
Overview of Phase II Project
 Through successful research, development, and demonstrations during Phase I of this
project, the Michigan Technological University team was able to test multiple sensors
on a Michigan-made multirotor UAV platform, along with other UAVs, enabling the collection
of data types such as optical, light detection and ranging (lidar), and thermal to
achieve a detailed view of various MDOT infrastructure.
Through successful research, development, and demonstrations during Phase I of this
project, the Michigan Technological University team was able to test multiple sensors
on a Michigan-made multirotor UAV platform, along with other UAVs, enabling the collection
of data types such as optical, light detection and ranging (lidar), and thermal to
achieve a detailed view of various MDOT infrastructure.
 Further development of UAV technology for the use of transportation infrastructure
assessment is required in order to fully implement these technologies into MDOT day-to-day
operations. By successfully continuing UAV research and development for MDOT, the
Michigan Tech team produced practical applications of large datasets that supports
MDOT’s business models and decision making processes as part of this Phase II analysis.
Further development of UAV technology for the use of transportation infrastructure
assessment is required in order to fully implement these technologies into MDOT day-to-day
operations. By successfully continuing UAV research and development for MDOT, the
Michigan Tech team produced practical applications of large datasets that supports
MDOT’s business models and decision making processes as part of this Phase II analysis.

The objectives of the Phase II research project were to develop, deploy, and implement:
- Near-time data collection communication backhaul and data storage capabilities
- UAV data uses, analysis, and processing systems to MDOT identified business functions and activities
- Data quality protocols ensure data collected is accurate and within tolerance
- UAV data collection uses for transportation uses
- To determine the return on investment for implementing UAVs into transportation purposes
- Provide device training and deployment/implementation plan, including a user/operation guidance document
UAV technology for the use of transportation infrastructure assessment was further developed to implement into MDOT day-to-day operations. Through this project, the team has successfully completed the following:
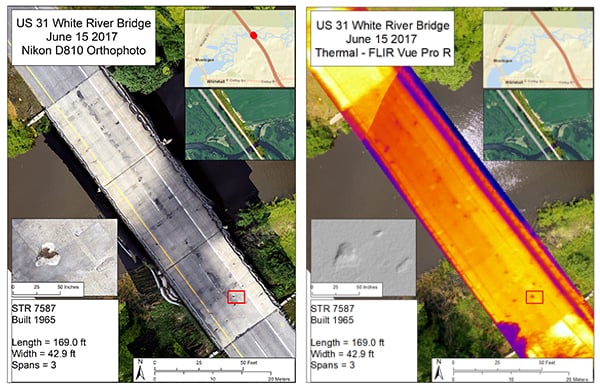
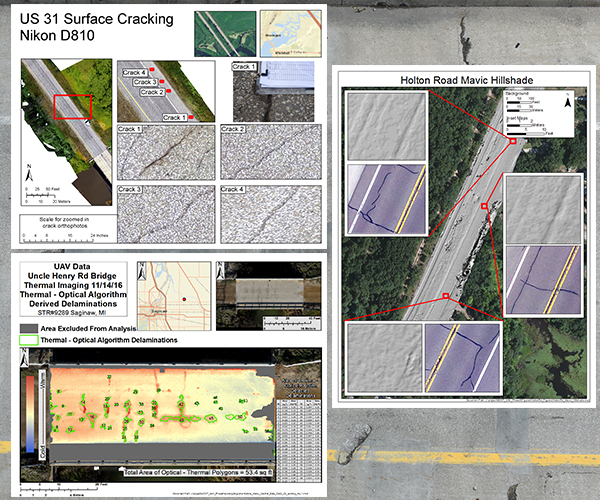
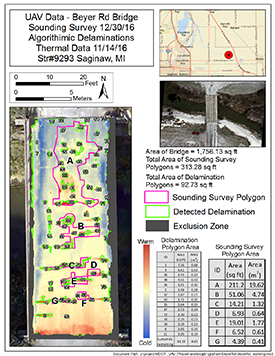
- Bridge deck and road corridors have been inspected using high-resolution optical, thermal, and lidar technologies. Algorithms have been created and updated to automatically identify and quantify defects such as spalls, delaminations, and cracks.
- Backhaul and data storage capabilities have been expanded upon to include a secure storage and a geospatial portal that has data “push” and “pull” capabilities.
- Detailed reporting describing and recommending methods for MDOT to store and distribute large UAV-collected datasets.
- Collected lidar data along a bridge and road corridor.
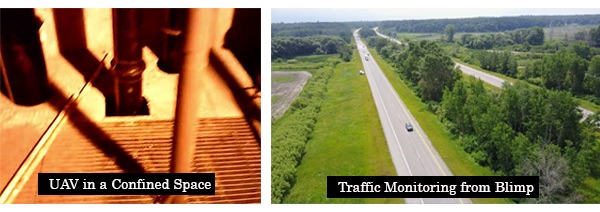
- Developed a traffic monitoring algorithm that uses imagery collected via a UAV platform.
- Monitored and modeled construction sites, including quantifying the volumetrics of gravel piles using optical sensors.
- Developed a benefits-costs analysis to determine MDOT’s return on investment that will result from deploying UAVs.
- Multiple team members have secured FAA Unmanned Remote Pilot Licenses.
Project Platforms




Sensors


