MTRI has developed a set of tools for taking existing and future V2X standards and integrating them into ROS for testing novel connected vehicle technology hardware. The suite of software is referred to as the QuickV2X toolbox, as it is intended to allow any hardware to communicate over the network by publishing and subscribing to the relevant ROS topics. Along with the core functions, the suite includes Real time visualization for debugging and monitoring tests in progress, shown in Figure 1. The visualization identifies incoming and outgoing messages, and can identify participants as physical or virtual. A screenshot of the visualization tool shows the locations of vehicles during a test on the highway loop at ACM, as well as the expected coverage of the RSUs in gray circles.
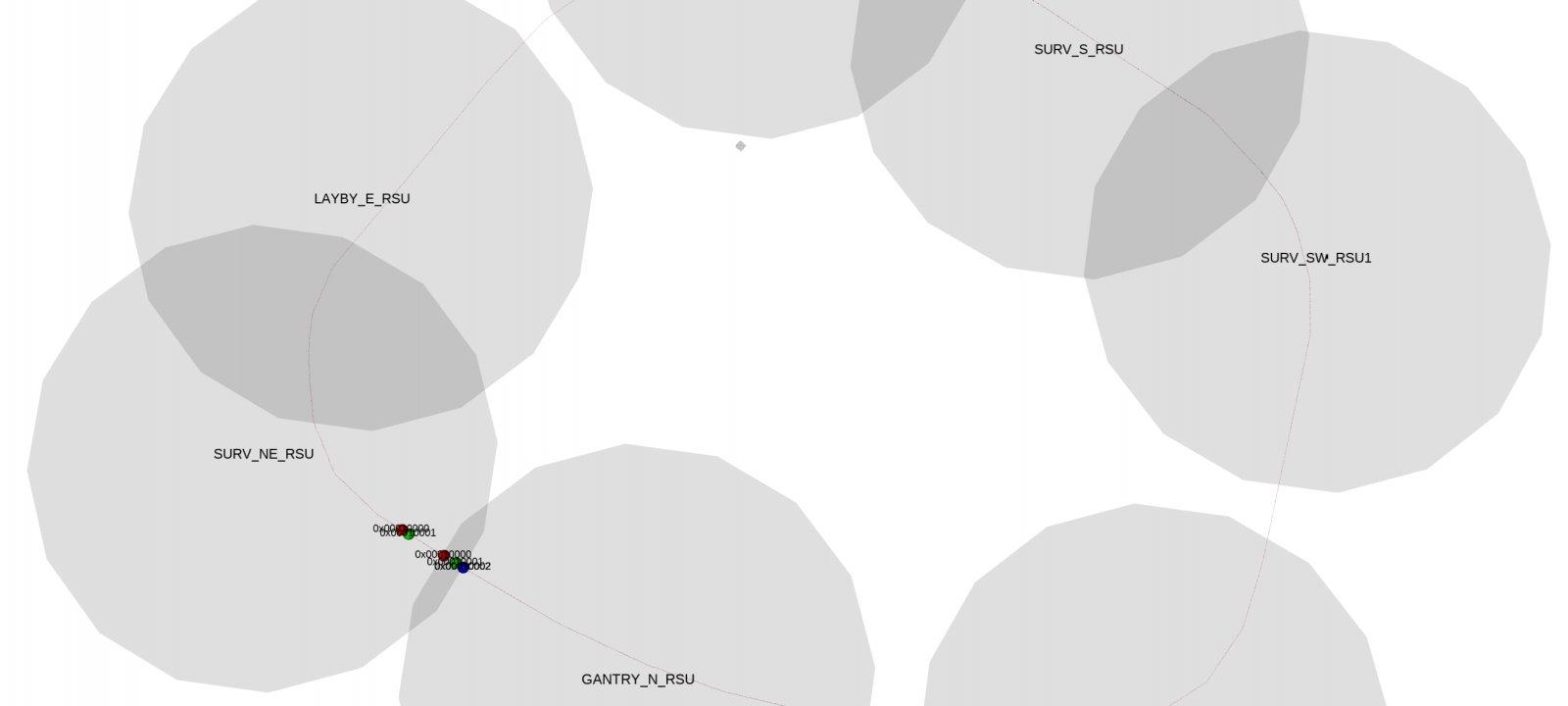
Figure 1: Real time visualization for debugging and monitoring tests
Our method involves compilation of source code from SAE standards using ASN1C documents, including the J2735 standard, as well as work in progress standards such as Cooperative Driving Automation (CDA) standards (J3251, J3252, J3282) and infrastructure-based prescriptive cooperative merge (J3256). This allows us to scale to multiple systems and perform research without the need for expensive licensing agreements. Additionally, the software can be tailored for specific architectures to reduce latency, and has hooks for python and C/C++ code. The software has been developed and tested with cooperative driving algorithms using real-time traffic controllers with commercial vehicles, shown in Figure 2, as well as custom robotic systems.

This software is maintained in a version control repository, and can be shared with collaborators.