MiTe-μ is a featherweight vehicle simulator developed by MTRI to assist in the development of mixed reality traffic experiments and sophisticated traffic control algorithms. The core purpose of MiTe-μ is to provide simulated vehicle targets that reproduce the control interface and response of both real V2X integrated vehicles and more sophisticated virtual vehicles provided by higher fidelity traffic simulators. This enables faster early development and iteration of cutting edge traffic controllers away from the test track without the complexity of setting up heavyweight simulators.
MiTe-μ is a collection of ROS nodes written in C++ along with a web-based visualizer. The primary components of MiTe-μ are:
- Featherweight vehicle simulators - These nodes instantiate point particle models of vehicles that respond to acceleration and speed commands based on simple kinematics according to user constraints (e.g., jerk limits). They follow GPS trajectories provided by the user, and can replicate any user specified command and state reporting interface. Users can choose to simulate vehicles that interact via BSM messages (replicating real V2X vehicles) or messages native to commercial simulators.
- Logging and data forwarding - These nodes record all state and command messages during an experiment and save them in easily processed formats. They also pass data along to the visualization components of MiTe-μ in a more abstract and unified format.
- Visualization - MiTe-μ includes a Python based web application that provides a real time, interactive visualization of all traffic in an experiment. A screenshot taken during a live test appears in Figure 1. The visualizer makes use of modern plotting tools to provide both a spatial map of vehicle locations and traces of vehicle data (i.e., speed, acceleration, elevation, etc.).
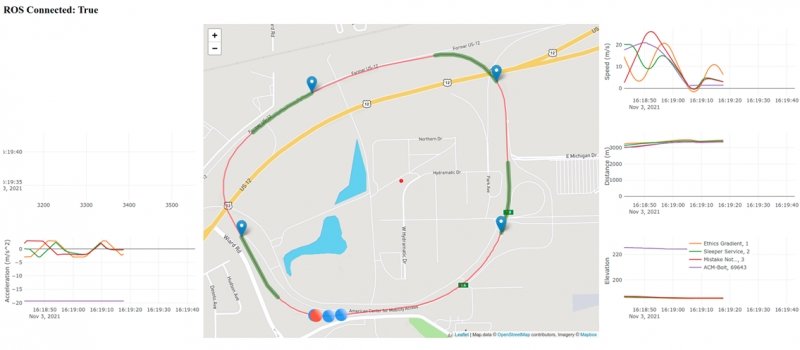
Figure 1: MiTe-u visualization screenshot from live test at ACM.
This software is maintained in a version control software repository and can be shared with collaborators.