

Michigan Technological University's Robotics and Remote Sensing Lab brought home an unprecedented win in the international Benchmark Autonomous Robot Navigation Challenge. Their victory could set a new standard for robotic navigational algorithms.
Amna Mazen had her sights set on a win for more than a year. The assistant professor of applied computing and manufacturing and mechanical engineering technology has been working on her algorithm for mobile robot navigation since her Ph.D. in robotics at the University of Detroit Mercy. Prior to graduating, Mazen traveled to Yokohama, Japan, for the IEEE International Conference on Robotics and Automation (ICRA) to watch and study the third annual Benchmark Autonomous Robot Navigation Challenge. A year later, as a new Michigan Tech faculty member, she and her team won the challenge by a wide margin.
ICRA, founded in 1984, is one of the largest and most prestigious robotics conferences in the world. At ICRA 2022, researchers from George Mason University, in collaboration with Clearpath Robotics, introduced the Benchmark Autonomous Robot Navigation (BARN) Challenge in order to create an annual benchmark for robotic navigation systems and elevate the performance of autonomous robots in challenging environments. This benchmark for success includes a public dataset of over 300 pregenerated simulated environments, which are used by robotics researchers around the world who put their own algorithms to the test against the formidable simulated obstacles.
The BARN dataset became integral to Mazen's work as a graduate student, as she was developing an algorithm for mobile robot navigation in unknown environments for her doctoral research.
"For my dissertation, I was comparing my algorithm with other algorithms, and I heard about BARN," said Mazen. "Before BARN, what any researcher working in robot navigation was doing was comparing their algorithm against one or two available algorithms and measuring their success against just those two."
Mazen was frustrated with that process. Accessing other algorithms for mobile robot navigation was often difficult due to intellectual property constraints. Comparing what she had developed against just a few algorithms was not sufficient to guarantee that her algorithm would be successful.
The introduction of the BARN dataset was a large step forward for the entire mobile robotics navigation industry. "Instead of having to go and find every existing algorithm for mobile robot navigation, I could compare it against the benchmark, get a score, and everyone after me can compare," Mazen said. "This whole process makes more sense now."
Utilizing the public benchmark dataset put the BARN Challenge on the map for Mazen. She applied for a grant to travel to Japan to watch the 2024 BARN Challenge as a spectator. In fall 2024, Mazen joined the faculty at Michigan Tech, with joint appointments in the College of Computing and College of Engineering. Competing in the 2025 challenge was part of her proposed research. She joined the Michigan Tech-based Robotics and Remote Sensing Lab (RRSL) and, with the help of two graduate students, got to work.
Navigating a Path to Victory
Prior to entering the BARN Challenge, Mazen needed to upgrade the algorithm she had written to work within the confines of the required Clearpath Jackal robot. The Jackal is a small field robot equipped with a 2D light detection and ranging (lidar) sensor and a maximum speed of two meters per second. Thankfully, Michigan Tech was able to acquire the Jackal.

With the assistance of Daniel Fuhrmann, professor and chair of the Department of Applied Computing, Michigan Tech bought the Jackal specifically for Mazen to use, both in the BARN Challenge and in her forthcoming research.
Mazen's research investigates how mobile robots like the Jackal can be used in the home to assist with household tasks. "That's for the future. Right now, we are only focused on the navigation aspect," she said.
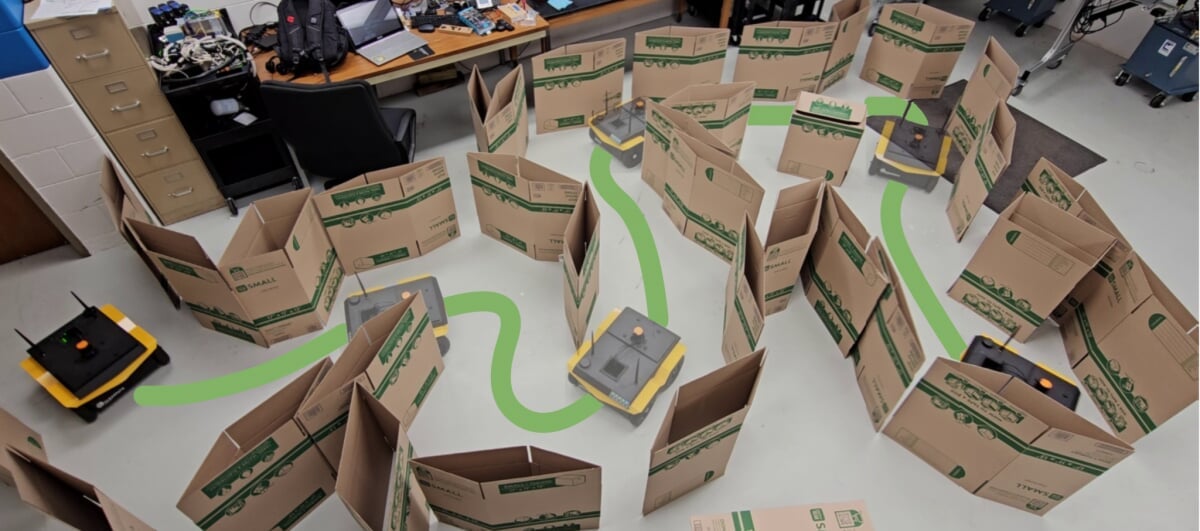
The overall task of BARN Challenge competitors is to develop navigational algorithms for their Clearpath Jackal, enabling the robot to autonomously navigate through an environment as quickly as possible without any collisions.
Prior to the 2025 challenge, Mazen's navigational algorithm needed to be updated. The task required the assistance of her two RRSL research assistants: Kamyab Yazdipaz, a computational sciences and engineering doctoral student, and Innocent Mateyaunga '25, a mechatronics master's student.
"When working on my dissertation, I knew that my algorithm had limitations and I knew the solution to those limitations," said Mazen. "In my lab here, my students worked to address those limitations, tested the algorithm against the BARN simulations and converted the algorithm into a new computing language."
Once the algorithm had been robustly updated, it was time to enter the competition.
Each year, the challenge takes place in two stages. Prior to the conference, each team's algorithms are tested against 50 unseen simulated environments and receive a score based on their success. The top eight scoring teams are invited to participate in the second stage, conducted physically, at ICRA. The conference was held this year in Atlanta, Georgia, running May 19-23. Based on their score, Mazen and her RRSL team entered the physical stage of the challenge in seventh place.
A New Algorithm Takes the Stage
The physical stage features three rounds with three real environments that are new to competitors. Every team runs through the same three environments multiple times and is allotted 20 minutes to tune their algorithm, making adjustments to the parameters for each environment. In this year's first round, the goal was to complete three successful runs, meaning no collisions, out of five possible attempts.
At the start of the competition, Mazen and the RRSL team decided not to tune their algorithm. "To me, taking time to tune an algorithm for every environment meant that my algorithm was not robust," explained Mazen. "If the algorithm is robust, it will work in a variety of environments."
Given the Michigan Tech team's decision not to adjust their algorithm, the BARN Challenge organizers asked them to go first. The Tech team successfully completed all five runs with no collisions. Out of the eight teams present, Michigan Tech was the only team to complete a successful run in that first round.
"After two collisions from the team that went after us, the challenge organizers came and asked if we minded giving the other teams more time to tune," recounted Mazen. The team was fine giving the competitors more time. "It wouldn't have been fun if we were the only ones to complete that first stage. But after more tuning, the other teams failed again."
Mazen credits her team's success to the way her algorithm was written.
"Basically, my algorithm follows rules rather than learns. 'If you see this, do that. If you see that, do this.' The other teams base their algorithms on learning a series of environments so that if the robot encounters something similar, it will navigate better than ours," Mazen explained.
"Since my algorithm is rule-based, it generalizes better. If the other teams encounter a brand new environment, they will not be as successful, but my robot will."
The second round did little to level the playing field. The Michigan Tech RRSL team completed four out of six possible runs. The RobotiXX team from George Mason University completed two runs, and the Autonomous Mobile Robots Lab team from the University of Virginia completed one run.
"After the first two rounds, the organizers declared us the winners because even if we didn't compete in the third round, we would still have won," said Mazen. "We were so successful in the first two rounds that there weren't enough runs in round three for any of the other teams to catch up."
They chose to compete anyway, because that's what the team had come to ICRA to do. The Michigan Tech RRSL team completed one successful run in the third and final round, further solidifying their win. "We were there to have fun and to compete," said Mazen. "The second day was nice though. No stress, since we knew we were already going to win."
After arriving in Atlanta for the physical portion of the BARN Challenge in seventh place, the Michigan Tech RRSL team took the runaway victory. George Mason University came in second place, and the University of Virginia took third.
The team's dominant win aside, it was Michigan Tech's first time entering the international challenge. Tech was the only first-time competitor to make it to the physical stage at ICRA. For Mazen, the success was unexpected.
"I didn't imagine that I would go to ICRA after only one year here at Michigan Tech," said Mazen. "I didn't imagine that I would go there to compete in the BARN Challenge, and I didn't imagine that we would get first place."

Mazen credits her team's success to the support of Michigan Tech. "Everyone here wants you to be successful," she said. "From day one, when I said I wanted to enter the competition, the College of Computing said, 'Yes, go for it. How can we help you?' And they bought the robot for me."
While the RRSL team members' success may have been unexpected, it did not go unnoticed by their fellow researchers across the field of autonomous robotics. Mazen hopes the winning performance will help to evolve challenges like BARN.
"Many people attending ICRA came up to us to ask how our algorithm works and how we were able to be so successful," she said. "The organizers told us that this competition may have to change in the future based on our performance. Algorithm tuning may be a thing of the past."
For Mazen, this is the logical next step to move the field of autonomous robotic navigation forward.
"We want everyone to be able to navigate through the environments successfully. That way we can focus on the next step, which is who can do it faster. That's the next problem, to be able to navigate the environments both successfully and optimally," she said.
Michigan Technological University is an R1 public research university founded in 1885 in Houghton, and is home to nearly 7,500 students from more than 60 countries around the world. Consistently ranked among the best universities in the country for return on investment, Michigan's flagship technological university offers more than 185 undergraduate and graduate degree programs in science, technology, engineering, mathematics, computing, forestry, business, health professions, robotics, psychology, social sciences, humanities, and the arts. The rural campus is situated just miles from Lake Superior in Michigan's Upper Peninsula, offering year-round opportunities for outdoor adventure.




Comments