Iver 3 Charts New Waters

Iver 3—a third-generation Autonomous Underwater Vehicle (AUV)—is charting new territories in the field of underwater exploration, and researchers at Michigan Technological University’s Great Lakes Research Center (GLRC) couldn’t be more excited. Iver represents the latest AUV technology available from its Massachusetts-based manufacturer, Ocean Server, and the first robot of its type available for public use.
Guy Meadows, director of the GLRC, has high hopes for the robot. “This is cutting edge tech,” he said. “There are very few places anywhere that have this capability. To be able to have the first of the new-generation vehicle and the first of the new-generation onboard sonar combined in one vehicle is tremendous.”
The AUV has already been out on two test runs—one in the Keweenaw Waterway and one in the Straits of Mackinac—and it performed magnificently, Meadows said.
Iver has two dual processor computers on board, Wifi, GPS, water flow and speed of sound sensors, and the latest in sonar technology. It can dive 330 feet and cover 30 miles of water on missions up to 12 hours. Iver will return to the factory this winter and receive a high definition camera, lights and a satellite phone.
These combined features make Iver an impressive research tool. Meadows explained: “You end up with a “survey quality” map of the bottom over the selected swath. The map size depends on the altitude of the robot above the lake floor, but at ten meters above the bottom you can map an entire football field.”
Meadows hopes to use Iver to gain an understanding of the currents flowing through the Straits of Mackinac. “Our new super computer at the GLRC lets us numerically predict the flow through the Straits, but we need a tool to validate this information. That’s where Iver comes in,” he explained. Using its sensors, Iver should be able to give researchers an accurate understanding of the movement of currents in this area as well as the bottom sediments.
The uses of Iver are not just limited to behavior of currents, however. Nina Mahmoudian, assistant professor of mechanical engineering-engineering mechanics and an expert on autonomous control of robots, is working with GLRC researchers to develop algorithms that will allow Iver to track long underwater features. “Those could be pipelines crossing the Great Lakes, or they could be underwater communication cables,” Meadows explained. “If we decided to develop offshore wind power systems in the Great Lakes, it could follow those power cables. Most importantly, it could check municipal water intakes.”
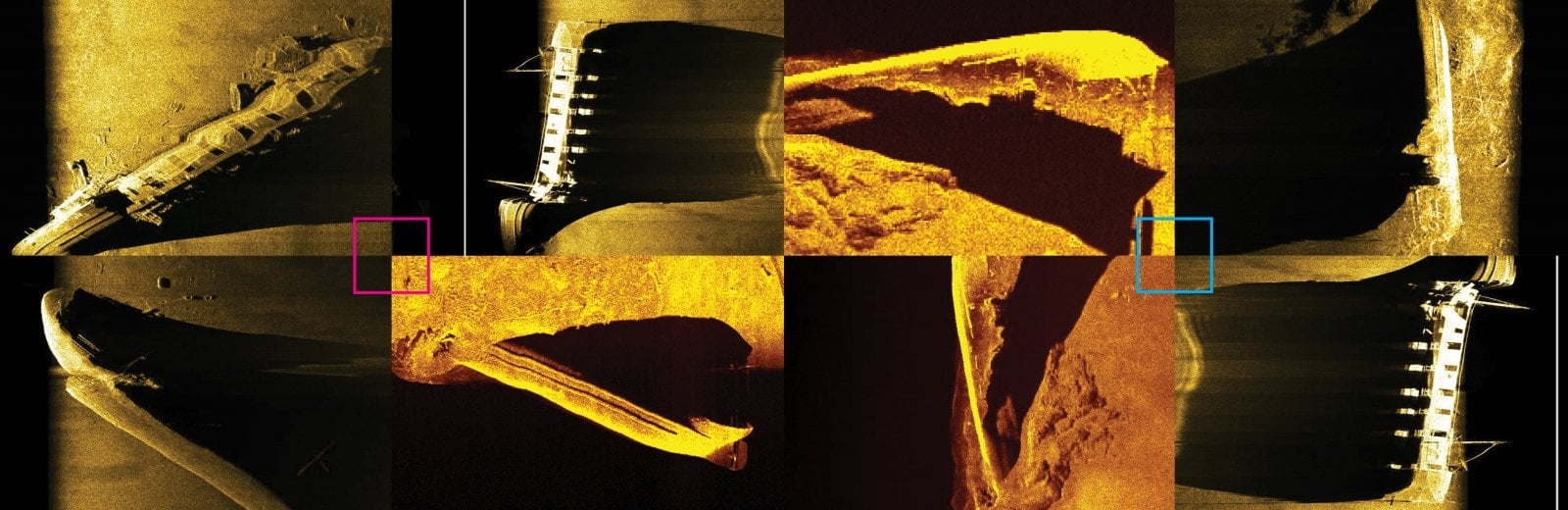
Researchers utilized this tracking capability last week during a mission at the Straits of Mackinac. Meadows was “pleasantly surprised” how well the robot completed the task. “We collected ultra-high resolution side scan sonar data of the pipeline and surrounding lake bottom topography at two frequencies, 600 and 1,600 kilohertz,” he said.
“Previously the pipeline was inspected approximately every five years by a complex operation involving a surface tug, barge and human piloted remotely operated vehicles (ROV's).,” Meadows went on to say. “This operation took many weeks to complete. Now, with Iver, it takes only about 2.5 hours to fully image the pipeline from shore to shore.”
Enbridge Pipelines Inc., which owns the pipeline and is partnering with Michigan Tech on the Advanced Underwater Sensing project, hopes the AUV will enable them to increase the frequency of these inspections to four times per year. In a news release issued last July, Enbridge called the new inspections “a proactive measure and to support the integrity management of the pipelines that cross the Straits.”
Checking pipelines, underwater cables and municipal water intakes without the expense and hazard of using human divers will make Iver a valuable new tool for corporations and municipalities, Meadows said.
In addition to research, Meadows hopes to use Iver to educate students. “We would really like graduate and undergraduate students to be involved with this advanced state-of-the-art vehicle,” he said.
Part of this educational mission is already underway at the docks of the GLRC. “We have created a 15-minute educational mission,” Meadows explained. “The robot starts at the end of our dock, does a countdown, then motors to its first checkpoint, where it will dive. It will then turn on its sonar and travel from checkpoint to checkpoint completely by itself. It’s very cool,” he said.
Meadows is excited about future projects for Iver. “Whether it’s tracking underwater features or mapping trout spawning beds, we can do this all much more precisely and in much greater detail than was ever possible.”
The research is supported by Enbridge Pipelines, Inc. and Michigan Tech. Both Michigan Tech and Enbridge are interested in making underwater pipelines, cables and municipal water intakes safer.
Michigan Technological University is a public research university founded in 1885 in Houghton, Michigan, and is home to more than 7,000 students from 55 countries around the world. Consistently ranked among the best universities in the country for return on investment, Michigan’s flagship technological university offers more than 120 undergraduate and graduate degree programs in science and technology, engineering, computing, forestry, business and economics, health professions, humanities, mathematics, social sciences, and the arts. The rural campus is situated just miles from Lake Superior in Michigan's Upper Peninsula, offering year-round opportunities for outdoor adventure.



Comments