Walking is not so straightforward. Tech researcher and CAREER Award recipient Mo Rastgaar designs robotic prostheses to improve mobility and agility.
The ankle is the sweet spot. The relatively small but complex joint greatly affects how humans walk, twirl, and jump. Turning is an essential motion.
So, why are ankle prostheses often designed with such limited range of motion? It's a question Mo Rastgaar, an assistant professor in mechanical engineering-engineering mechanics, has often wondered—a question that ultimately led him to build a better prosthetic ankle joint.
Rastgaar's design seeks to imitate natural turning in the human gait by enabling the ankle joint to move more freely. His synthesized ankle joint features two controllable degrees of freedom: up-down and side-side, which allow for rolling, an innate motion in the human ankle.

Rastgaar's robotic prosthesis uses more than just a moveable joint to create a more natural walk. The design itself can only mimic the complexity of human feet and ankles—which sport more than 26 bones, 33 joints, and 100 muscles, tendons, and ligaments. So along the bottom of the foot is another feature to infuse a natural gait: a row of pressure-sensitive sensors. These sensors can detect changes in pace, direction, and pressure, and then send signals to a microprocessor that adjusts the prosthesis' motion.
All told, the robotics, mobile joint, and sensors make the prosthesis much more steerable than current microprocessor units on the market, which only feature a toe up-down motion. "That's only fine if you are marking time on a treadmill," Rastgaar says.
Current models also tend to be bulky. Rastgaar, his PhD student Evandro Ficanha, and members of Michigan Tech's Human-Interactive Robotics Lab (HIRoLab) have worked to change that.
"I wanted to help people in a very direct way, and that's what we are doing."Mo Rastgaar
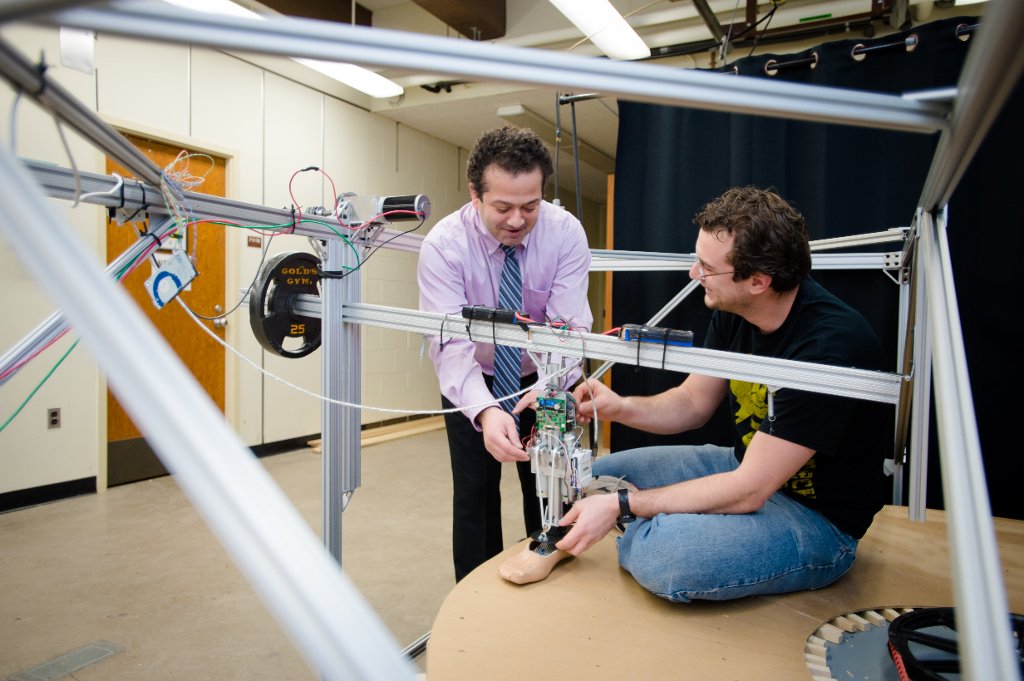
"Powered prostheses should be lightweight, and you also should be able to apply an adequate amount of torque to the ankle joint," Rastgaar says, demonstrating the mechanics of the ankle-foot prosthesis as it lumbers around a mechanical, circular track. The HIRoLab built the track specifically to assess how the prosthesis moves and turns.
To eliminate bulk and free the ankle, Rastgaar and his team moved the power mechanism up and away from the leg using a cable-driven mechanism. The basis of the design centers on making microprocessor prostheses more usable.
"I wanted to help people in a very direct way, and that's what we are doing," Rastgaar says of his work, which is funded by a five-year Faculty Early Career Development (CAREER) Award from the National Science Foundation. "Eventually, I'd like to commercialize our prosthesis. It should be helping amputees walk."
Michigan Technological University is a public research university founded in 1885 in Houghton, Michigan, and is home to more than 7,000 students from 55 countries around the world. Consistently ranked among the best universities in the country for return on investment, Michigan’s flagship technological university offers more than 120 undergraduate and graduate degree programs in science and technology, engineering, computing, forestry, business and economics, health professions, humanities, mathematics, social sciences, and the arts. The rural campus is situated just miles from Lake Superior in Michigan's Upper Peninsula, offering year-round opportunities for outdoor adventure.